A happy solution presented itself yesterday. Pololu offers a breakout board equipped with an Allegro A4983 controller.
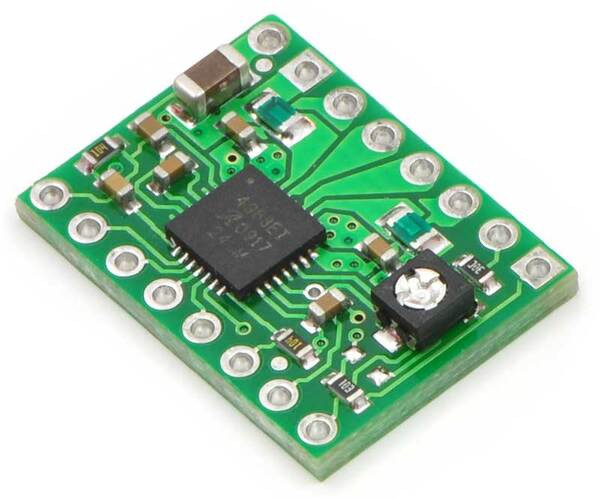
The A4983 is somewhat different than the A3977 that is standard in Reprap electronics in two ways. Foremost, the A4983 can handle a maximum current of only 2 amps instead of the A3977's 2.5. I don't find this compelling because in practice Repraps rarely require more than 1 amp in any case.
The winner for me is that the A4983 controller allows for microstepping down to 1/16 compared to the A3977's 1/8. While the A3977's microstepping is more than adequate for conventional Reprap machines I can use the extra resolution with the Delta Robot.
8 comments:
My name is Chris Palmer, don't know who Chris Dyson is but he probably wont appreciate being called nophead!
Sorry Chris. Just chalk it up to me getting old and confused. It's fixed. No malice was intended. :-(
Its the vacuum bed tie in both are innovative designers :-)
love to see pictures when you have it wired up. i think a decent number of people are playing with these. combination of price and micro-stepping.
i plan on going this route. mainly because the price. but i don't know what i will do for the extruder.
Pic-based controller?
Tell us more !
Software who drives it? schmatics?
Regards
btw http://www.pololu.com/catalog/product/1202
could save time to avoid external power regulator
Cristian Paul said...
Pic-based controller?
http://www.3dreplicators.com/cgi-bin/cblog/index.php?/archives/537-Tommelise-3.0-I2C-board-finally-built.html
I write my own firmware.
"btw http://www.pololu.com/catalog/product/1202
could save time to avoid external power regulator"
The boards that I build already have voltage regulation, so I don't need to do that again. :-)
Post a Comment